
Sitemap
A list of all the posts and pages found on the site. For you robots out there is an XML version available for digesting as well.
Pages
Posts
Future Blog Post
Published:
This post will show up by default. To disable scheduling of future posts, edit config.yml and set future: false.
Blog Post number 4
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Blog Post number 3
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Blog Post number 2
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Blog Post number 1
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
portfolio
Swarm Robotics and Multi-robot Systems
Our goal is to develop new methodologies to control swarm robotic systems to fulfill complex tasks that cannot be accomplished by a single robot. 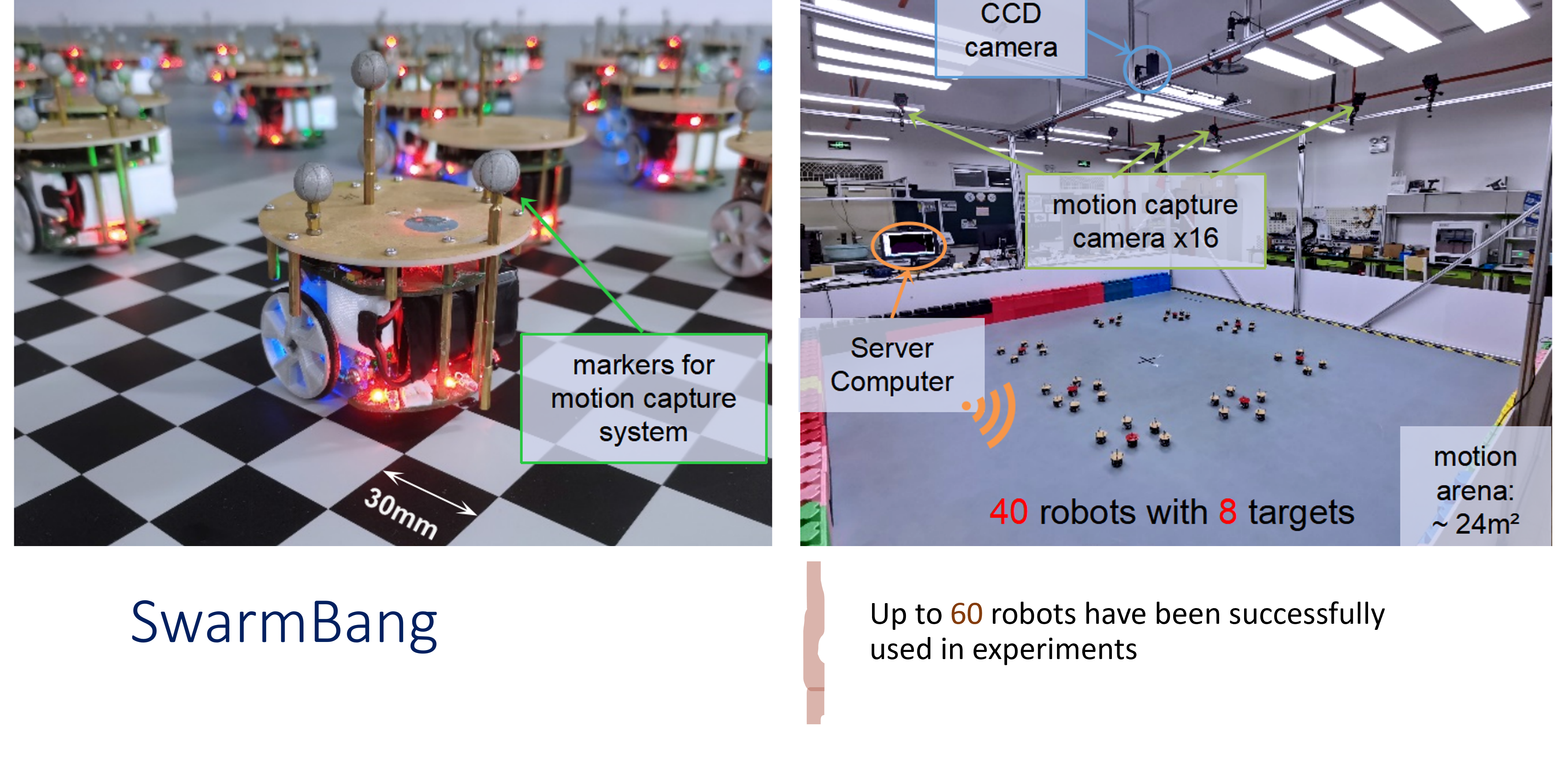
projects
publications
Multi-target trapping with swarm robots based on pattern formation
Published in Robotics and Autonomous Systems, 2018
Zhang, S., Liu, M., Lei, X., Huang, Y., & Zhang, F. (2018).). "Multi-target trapping with swarm robots based on pattern formation. " Robotics and Autonomous Systems, 106, 1-13.
Download Paper | Download Slides
Stay-eat or run-away: Two alternative escape behaviors
Published in Physics Letters A, 2019
Zhang, S., Liu, M., Lei, X., & Huang, Y. (2019). "Stay-eat or run-away: Two alternative escape behaviors. " Physics Letters A, 383(7), 593-599.
Download Paper | Download Slides
Group chase and escape with prey anti-attack behavior
Published in Physics Letters A, 2019
Zhang, S., Liu, M., Lei, X., Yang, P., Huang, Y., & Clark, R. (2019). "Group chase and escape with prey anti-attack behavior. " Physics Letters A, 383(30), 125871.
Download Paper | Download Slides
Dynamics and motion patterns of a k-capture game with attraction-repulsion interaction
Published in Europhysics Letters, 2019
Zhang, S., Liu, M. Y., Lei, X. K., & Huang, Y. K. (2019).. "Dynamics and motion patterns of a k-capture game with attraction-repulsion interaction. " Europhysics Letters, 128(1), 10003.
Download Paper | Download Slides
Frequency-dependent strategy selection in a hunting game with a finite population
Published in Applied Mathematics and Computation, 2020
Zhang, S., Clark, R., & Huang, Y. (2020). "Frequency-dependent strategy selection in a hunting game with a finite population. " Applied Mathematics and Computation, 382, 125355.
Download Paper | Download Slides
Synchronous intercept strategies for a robotic defense-intrusion game with two defenders
Published in Autonomous Robots, 2021
Zhang, S., Liu, M., Lei, X., Yang, P., Huang, Y., & Clark, R. (2021). "Synchronous intercept strategies for a robotic defense-intrusion game with two defenders. " Autonomous Robots, 45, 15-30.
Download Paper | Download Slides
Collecting a flock with multiple sub-groups by using multi-robot system
Published in IEEE Robotics and Automation Letters, 2022
Zhang, S., & Pan, J. (2024). "Collecting a flock with multiple sub-groups by using multi-robot system. " IEEE Robotics and Automation Letters, 7(3), pp. 6974-6981.
Download Paper | Download Slides
Collective fission behavior in swarming systems with density-based interaction
Published in Physica A: Statistical Mechanics and its Applications, 2022
Zhang, S., Lei, X., Zheng, Z., & Peng, X. (2022). "Collective fission behavior in swarming systems with density-based interaction. " Physica A: Statistical Mechanics and its Applications. 603, 127723.
Download Paper | Download Slides
Self-organized multi-target trapping of swarm robots with density-based interaction
Published in Complex & Intelligent Systems, 2023
Lei, X., Zhang, S*., Xiang, Y., & Duan, M. (2023). "Self-organized multi-target trapping of swarm robots with density-based interaction. " Complex & Intelligent Systems. 9(5), 5135-5155.
Download Paper | Download Slides
A Distributed Outmost Push Approach for Multi-robot Herding
Published in IEEE Transactions on Robotics, 2024
Zhang, S., Lei, X., Duan, M., Peng, X., & Pan, J. (2024). "A Distributed Outmost Push Approach for Multi-robot Herding." IEEE Transactions on Robotics, 40, pp. 1706-1723.
Download Paper | Download Slides
Cooperative Object Transport by Two Robots Connected With a Ball-String-Ball Structure
Published in IEEE Robotics and Automation Letters, 2024
Huang Y., and Zhang, S*.. "Cooperative Object Transport by Two Robots Connected With a Ball-String-Ball Structure. " IEEE Robotics and Automation Letters, 9(5), pp. 4313-4320.
Download Paper | Download Slides
Heterogeneous targets trapping with swarm robots by using adaptive density-based interaction
Published in IEEE Transactions on Robotics, 2024
Zhang, S., Lei, X., Peng, X. & Pan, J. (2024). "Heterogeneous targets trapping with swarm robots by using adaptive density-based interaction. " IEEE Transactions on Robotics, 40, pp. 2729-2748.
Download Paper | Download Slides
talks
Conference Proceeding talk on ICIRA 2015
Published:
I give a presentation on the conference titiled “Gene regulatory networks with asymmetric information for swarm robot pattern formation”.
Conference Proceeding talk on ICARM 2016
Published:
I give a presentation on the conference titiled “Pattern formation in constrained environments: A swarm robot target trapping method”.
Conference Proceeding talk on SECESA 2018
Published:
I give a presentation on the conference titiled “Improved collaborative optimization in multidisciplinary design optimization problems”.
Seminar talk at The Hong Kong Polytechnic University
Published:
I give a talk at the Department of Aeronautical and Aviation Engineering, The Hong Kong Polytechnic University, titiled “Swarm Robotics in Adversarial Scenarios”.
Conference Proceeding talk on IROS 2022
Published:
I give a presentation on the conference titiled “Collecting a flock with multiple sub-groups by using multi-robot system”.
Conference Proceeding talk on ICSICR 2023
Published:
I give a presentation on the conference titiled “A distributed outmost push approach for multi-robot herding”.
Seminar talk at Xi’an University of Architecture and Technology
Published:
I give a talk for undergraduates to introduce potential postions like Research Assistant, Ph.D, Research Associate positions etc., in Hong Kong.
teaching
Optimization Methods in Robotics
Undergraduate/Postgraduate, Control and Autonomous systems, 2024
I am preparing a course about optimization methods in robotics. Click the title for more information.
Shape Formation Control in Robotics
Undergraduate/Postgraduate, Control and Autonomous systems, 2024
I am preparing a course about Shape Formation Control in Robotics. Click the title for more information.